Jaa:



Colinear-järjestelmä ja esimerkit
koliiniset vektorit Ne ovat yksi kolmesta nykyisten vektorien tyypistä. Kyse on niistä vektoreista, jotka ovat samassa suunnassa tai toimintalinjalla. Tämä tarkoittaa seuraavaa: kaksi tai useampia vektoreita ovat kollinaarisia, jos ne on järjestetty keskenään yhdensuuntaisiin suoriin linjoihin.
Vektori määritellään kehoon sovellettavaksi määräksi, ja sille on ominaista, että sillä on suunta, tunne ja asteikko. Vektorit löytyvät tasosta tai avaruudesta ja voivat olla eri tyyppisiä: koliinisia vektoreita, samanaikaisia vektoreita ja rinnakkaisia vektoreita.
indeksi
- 1 kolineaalinen vektori
- 2 Ominaisuudet
- 2.1 Esimerkki 1
- 2.2 Esimerkki 2
- 2.3 Esimerkki 1
- 3 Collinear-vektorijärjestelmä
- 3.1 Kollektiiviset vektorit, joilla on vastakkaiset aistit
- 3.2 Samassa merkityksessä olevat kollektiiviset vektorit
- 3.3 Kollektiiviset vektorit, joilla on yhtä suuret ja vastakkaiset aistit
- 4 Ero kolinääristen ja samanaikaisten vektorien välillä
- 5 Viitteet
Collinear-vektorit
Vektorit ovat kollinaarisia, jos yhden toimintalinja on täsmälleen sama kuin kaikkien muiden vektorien sama toimintalinja, riippumatta kunkin vektorin koosta ja merkityksestä.
Vektoreja käytetään edustuksina erilaisilla aloilla, kuten matematiikassa, fysiikassa, algebrassa ja myös geometriassa, jossa vektorit ovat kollinaarisia vain silloin, kun niiden suunta on sama, riippumatta siitä, onko niiden merkitys ole..
piirteet
- Kaksi tai useampia vektoreita ovat yhteisiä, jos koordinaattien välinen suhde on sama.
Esimerkki 1
Meillä on vektorit m = m_x; m_y ja n = n_x; n_y. Nämä ovat yhteisiä, jos:

Esimerkki 2

- Kaksi tai useampia vektoreita ovat kollinaarisia, jos tuote tai vektorin kertolasku on nolla (0). Tämä johtuu siitä, että koordinaattijärjestelmässä jokaiselle vektorille on tunnusomaista sen vastaavat koordinaatit, ja jos ne ovat verrannollisia toisiinsa, vektorit ovat kollinaarisia. Tämä ilmaistaan seuraavasti:

Esimerkki 1
Meillä on vektorit a = (10, 5) ja b = (6, 3). Jotta voitaisiin määrittää, ovatko ne yhteisiä, sovelletaan determinantin teoriaa, joka muodostaa ristituotteiden tasa-arvon. Näin sinun on:

Colinear-vektorijärjestelmä
Kolinaariset vektorit on esitetty graafisesti näiden suuntausten ja merkkien perusteella, kun otetaan huomioon, että niiden täytyy kulkea sovelluspaikan ja moduulin läpi, joka on tietty asteikko tai pituus.
Kollektiivisten vektorien järjestelmä muodostetaan, kun kaksi tai useampia vektoreita toimii objektiin tai kehoon, joka edustaa voimaa ja toimii samalla suuntaan.
Jos esimerkiksi kehoon kohdistetaan kaksi kollinaarista voimaa, näiden tulos johtuu vain suunnasta, jossa ne toimivat. On kolme tapausta, jotka ovat:
Kollektiiviset vektorit, joilla on vastakkaiset aistit
Kahden kollinaarisen vektorin tulos on yhtä suuri kuin näiden summa:
R = Σ F = F1 + F2.
esimerkki
Jos kaksi voimaa vaikuttaa koriin F1 = 40 N ja F2 = 20 N vastakkaiseen suuntaan (kuten kuvassa), tulos on:
R = Σ F = (- 40 N) + 20N.
R = - 20 N.

Collineear-vektorit, joilla on sama merkitys
Tuloksena olevan voiman suuruus on yhtä suuri kuin kollinaaristen vektorien summa:
R = Σ F = F1 + F2.
esimerkki
Jos kaksi voimaa vaikuttaa koriin F1 = 35 N ja F2 = 55 N samaan suuntaan (kuten kuvassa), tulos on:
R = ΣF = 35 N + 55N.
R = 90 N.

Positiivinen tulos osoittaa, että kollinaariset vektorit toimivat vasemmalle.
Kollektiiviset vektorit, joilla on yhtä suuret ja vastakkaiset aistit
Kahden kollinaarisen vektorin tulos on yhtä suuri kuin kollinaaristen vektorien summa:
R = Σ F = F1 + F2.
Koska voimilla on sama suuruus, mutta vastakkaiseen suuntaan, toinen tulee olemaan positiivinen ja toinen negatiivinen, kun kaksi voimaa lisätään, tuloksena oleva on yhtä suuri kuin nolla.
esimerkki
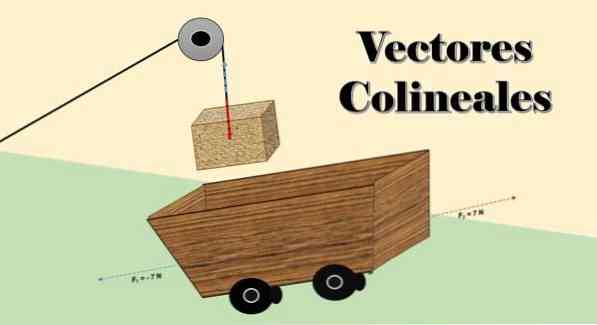
Jos kaksi voimaa vaikuttaa koriin F1 = -7 N ja F2 = 7 N, joilla on sama suuruus, mutta vastakkaiseen suuntaan (kuten kuvassa näkyy), tulos on:
R = ΣF = (-7 N) + 7N.
R = 0.

Koska tuloksena oleva on yhtä suuri kuin 0, se tarkoittaa, että vektorit ovat tasapainossa toisiinsa nähden ja siksi keho on tasapainossa tai levossa (se ei liiku).
Ero kolinaaristen ja samanaikaisten vektorien välillä
Collinear-vektoreille on tunnusomaista, että niillä on sama suunta samassa linjassa tai koska ne ovat yhdensuuntaisia linjan kanssa; toisin sanoen ne ovat vektoreja, jotka ovat suoria rinnakkaisia linjoja.
Toisaalta rinnakkaiset vektorit määritellään, koska ne ovat eri toimintalinjoissa, jotka siepataan yhdessä pisteessä.
Toisin sanoen niillä on sama lähtö- tai saapumispaikka - riippumatta niiden moduulista, suunnasta tai suunnasta - muodostaen kulman niiden välillä.
Rinnakkaisvektorien järjestelmät ratkaistaan matemaattisilla menetelmillä tai kaavioilla, jotka ovat voimien rinnakkaisohjelman ja voimien polygonin menetelmän. Näiden avulla määritetään tuloksena olevan vektorin arvo, joka osoittaa suunnan, jolla keho liikkuu.
Periaatteessa pääasiallinen ero kolinääristen vektorien ja samanaikaisesti esiintyvien vektorien välillä on toimintalinja, jossa ne toimivat: kollinaariset toimivat samassa linjassa, kun taas samanaikaiset erilaiset.
Toisin sanoen kollinaariset vektorit toimivat yhdessä tasossa, "X" tai "Y"; ja samanaikainen teko molemmissa tasoissa alkaen samasta pisteestä.
Kollinaariset vektorit eivät ole pisteessä, samoin kuin samanaikaiset, koska ne ovat rinnakkain toistensa kanssa.

Vasemmassa kuvassa näkyy lohko. Se on sidottu köyteen ja solmu jakaa sen kahteen; kun se vedetään kohti eri suuntauksia ja eri voimia, lohko siirtyy samaan suuntaan.
Esitetään kaksi vektoria, jotka sopivat yhteen pisteeseen (lohko) riippumatta niiden moduulista, aistista tai suunnasta.
Sen sijaan oikeassa kuvassa näkyy hihnapyörä, joka nostaa laatikon. Köysi edustaa toimintalinjaa; kun sitä vedetään, kaksi voimaa (vektoreita) vaikuttaa siihen: yksi jännitysvoima (kun kiipeää lohkoon) ja toinen voima, joka käyttää lohkon painoa. Molemmilla on sama suunta, mutta vastakkaisiin suuntiin; eivät ole yhtä mieltä.
viittaukset
- Estalella, J. J. (1988). Vektorianalyysi. Volume 1.
- Gupta, A. (s.f.). Tata McGraw-Hill koulutus.
- Jin Ho Kwak, S. H. (2015). Lineaarinen algebra. Springer Science & Business Media.
- Montiel, H. P. (2000). Fysiikka 1 teknisen tutkinnon suorittamiseen. Patrian toimittajaryhmä.
- Santiago Burbano de Ercilla, C. G. (2003). Yleinen fysiikka Toimituksellinen Tebar.
- Sinha, K. (s.f.). Matematiikan tekstikirja XII. 2. Rastogi-julkaisut.